Disclaimer: The Physical Oceanography Research Group (PO-Res. Grp) makes every
effort to ensure that information contained in these pages is accurate and up to
date. However, the PO-Res. Grp accepts no liability and/or responsibility for the
reliance placed by the users of these pages on the information contained in these
pages or any other information accessed via this web page. The information provided
in these pages is provided on an "as is" basis and no warranties of any kind are
issued whether expressly or implied by the PO-Res. Grp on the information provided.
Robot sailors
31st August 2020
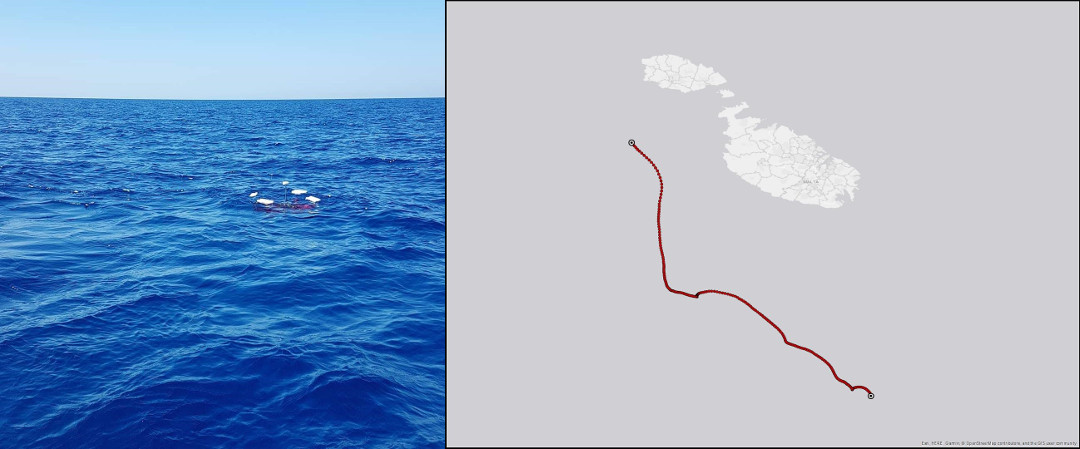
Figure 1: Drifter deployed on 24/08/2020 09:00 (UTC) moving south.
COVID-19 might have delayed our travel plans. However, it did not stop ocean
instruments from crossing our boarders. A drifter released 8 nautical miles west
of Ġnejna on the 24th August 2020 09:00 UTC, is now about 38km south of Malta
(Figure 1). So far, it has only been a five-day journey, but fifteen more months
of data collection and real-time transmissions are expected.
Drifters are designed to float and to follow currents in the top 1m. Every hour,
they establish satellite communication and transmit their location, the sea
surface temperature, as well as other data collected by the onboard electronics.
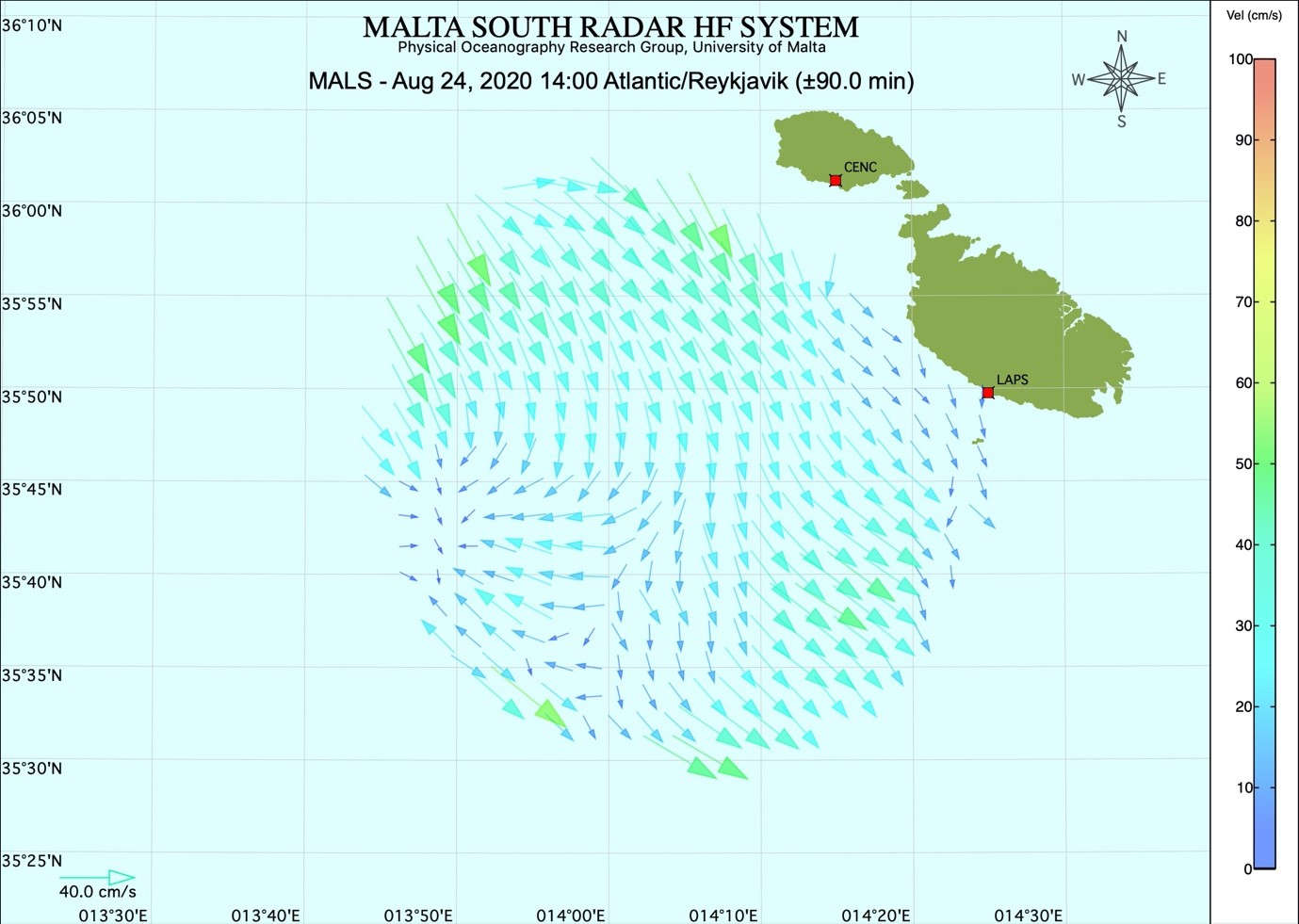
Their movements help to validate data measured by the CALYPSO HF Radar network
that was recently extended by two new stations at Għar Lapsi in Malta and Ta’
Ċenċ in Gozo. These two additional sites allow sea surface currents in the south
of the islands to be measured and mapped in real-time every hour (Figure 3).
The project addresses the challenges of safer marine transportation, protection
of human lives at sea, and safeguarding of marine and coastal resources from
irreversible damages. CALYPSO South is also committed to put technological
advancement and scientific endeavour at the service of humanitarian responses,
reducing risks in sea faring, and protecting the marine environment. This project
is led by Prof. Aldo Drago from the Physical Oceanography Research Group
(Department of Geosciences) within the Faculty of Science of the University of
Malta, and partially financed by the Interreg V-A Italia-Malta 2014-2020 programme.
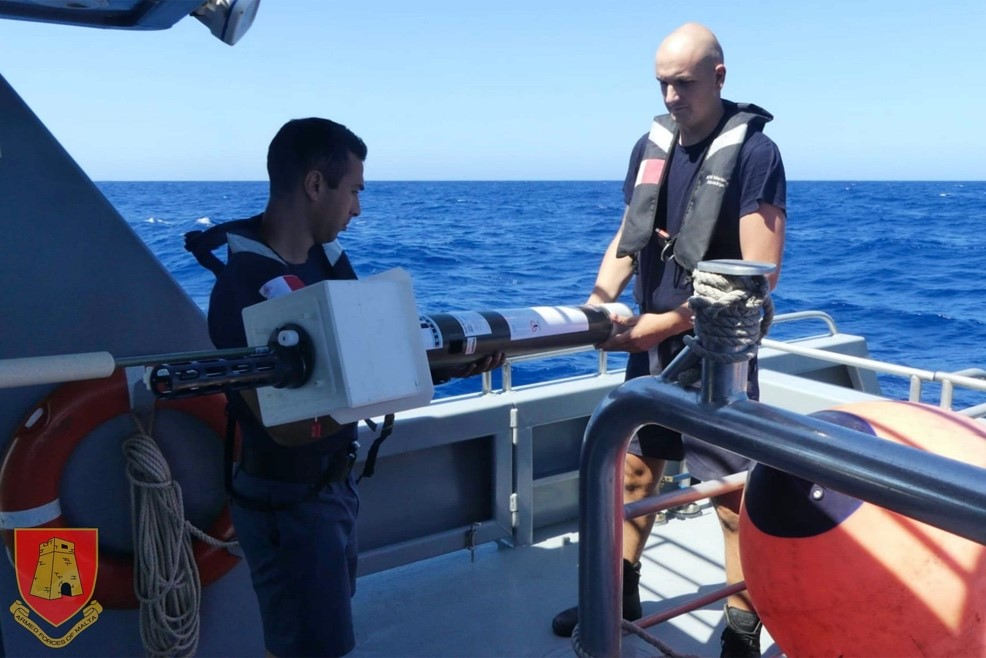
In this mission, the drifter was released together with a float. Together, they
are collecting important parameters in an area that is not very commonly observed
(Figure 3). Floats are sophisticated equipment that can be programmed to
autonomously go up and down the water column while measuring physical parameters
including temperature and salinity. Once deployed, pumps inflate and deflate
bladders to change the instrument’s buoyancy that in turn, allow it to ascend or
descend. Once released, floats make their way to their set parking depth (in this
case 250m) and drift. At specific time intervals, these dive to the bottom and
gradually start going up at about 10 centimetres per second while taking
measurements at a high frequency. At the surface, they wait until satellite
communication is established, transfer the collected data, and repeat the cycle.
These experiments are being coordinated by Dr Adam Gauci, responsible for ocean
observations of the Physical Oceanography Research Group. The Maritime Squadron
of the Armed Forces of Malta (AFM) greatly assisted with the deployment of the
instruments. This research is also being done in collaboration with the Istituto
Nazionale di Oceanografia e di Geofisica Sperimentale (OGS-Italy) that runs the
ARGO-Italy programme. Such long-term monitoring systems provide a unique source
of information to study the role of the oceans, and in this case, the Mediterranean
Sea, on the climate system. This and similar missions make possible the collection
of data required by operational ocean monitoring systems to improve and extended
forecasts of the atmosphere and oceans.
Figure 2: Currents by the CALYPSO South HF radar network.
Figure 3: AFM personnel deploying the float.